Pinza di Robot Collaborativu - ISC Morsetto Internu Morbido Pinza di Braccio Cobot



Categoria Principale
Bracciu roboticu industriale / Bracciu roboticu collaborativu / Pinza elettrica / Attuatore intelligente / Soluzioni di automatizazione / pinza per bracciu cobot / pinza morbida / pinza per bracciu roboticu
Applicazione

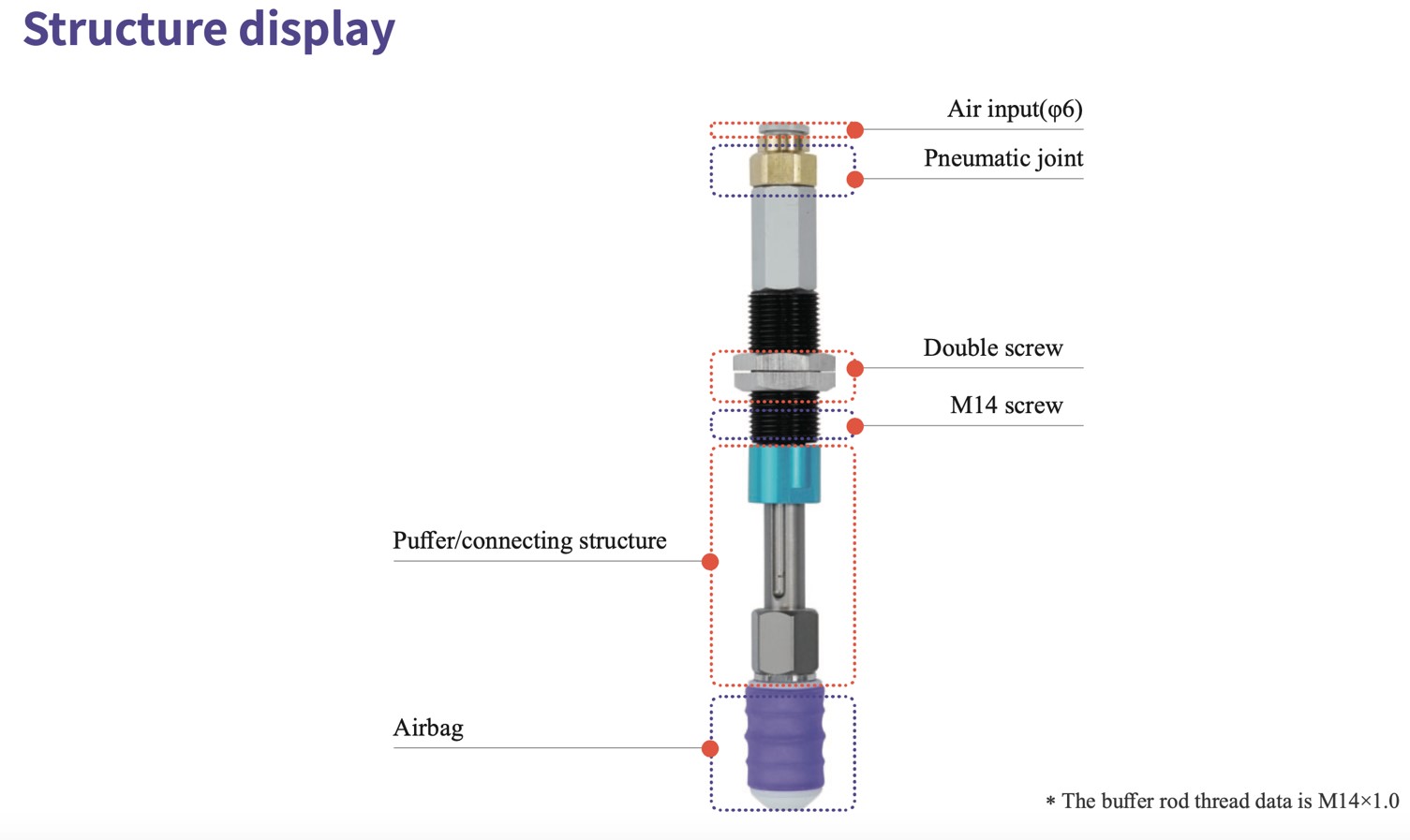
A pinza di supportu interna ISC hè un dispositivu dolce innovativu, chì u so cuncepimentu imita a morfologia di autodifesa di u pesciu palla. Gonfiendu l'aria cù pressione, u dispositivu pò espansione è cumpletà a presa di supportu interna.
A causa di u fattu chì a parte di cuntattu cù a pezza hè una gomma di silicone dolce, dopu avè aghjuntu una pressione, ci serà un stratu di "cuscinu d'aria" trà u supportu rigidu è a superficia di cuntattu, rendendu a tensione uniforme è micca prubabile di dannà a pezza. Inoltre, a pressione di l'aria d'entrata pò esse aghjustata per cuntrullà l'estensione di l'airbag è a tensione di cuntattu cù a pezza, in modu da aumentà significativamente a morbidezza di u sistema di presa.
Funziunalità

·Media di guida: aria pulita
· Durata di vita standard di travagliu: > 100.000 volte
·Frequenza massima di funziunamentu (cpm): 300
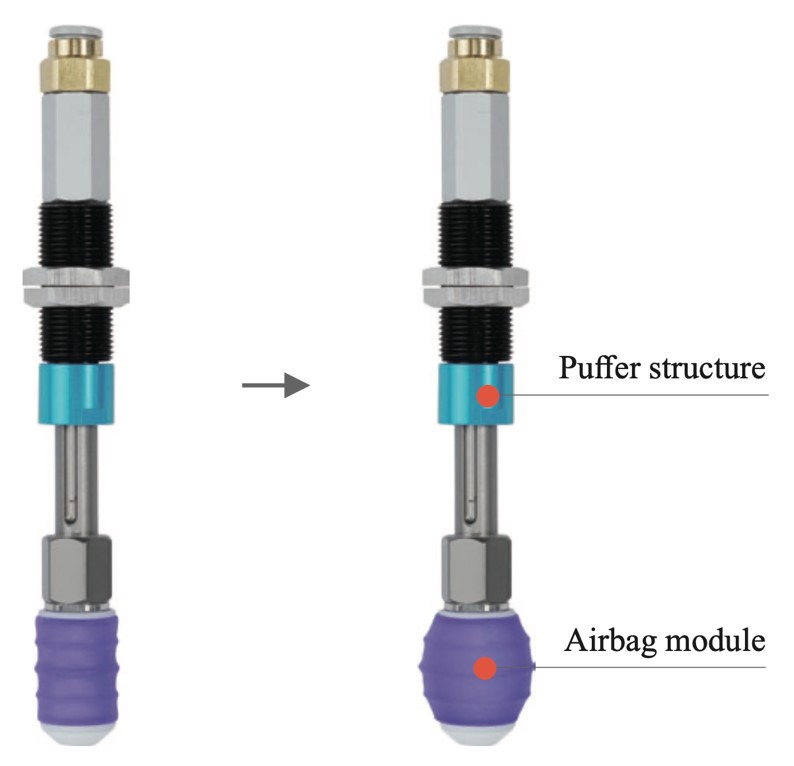
● A pinza di supportu interna hà una struttura speciale di l'airbag è pò pruduce diverse deformazioni inseme cù a pressione interna.
● Pressione pusitiva d'ingressu: L'attrezzatura si estende, sustenendusi in modu autoadattivo à a superficia interna di l'ughjettu è cumpletendu a presa.
● Pressione negativa d'ingressu: L'apparecchiatura presenta stati naturali è libera l'uggetti.
E pinze morbide SFG sò state impiegate cù bracci robotichi collaborativi di classe mundiale, cumpresi:

Robot Delta à 4 assi horizontale (SCARA).
Bracciu di robot industriale Nachi Fujikoshi
Robot parallelu à 4 assi (Delta) ABB
Robot collaborativu à 6 assi UR
Robot collaborativu à 6 assi AUBO



Parametru di Specificazione
A pinza di supportu interna di l'airbag ISC hè un dispositivu dolce innovativu, chì u so cuncepimentu imita a morfologia di autodifesa di u pesciu palla. Gonfiendu l'aria cù pressione, u dispositivu pò espansione è cumpletà a presa di supportu interna. Siccomu a pressione di l'aria in entrata pò esse cuntrullata precisamente, a forza di presa nantu à u dispositivu per u pezzu di travagliu pò esse cuntrullata, ciò chì ùn hè micca faciule da dannà u pezzu di travagliu.
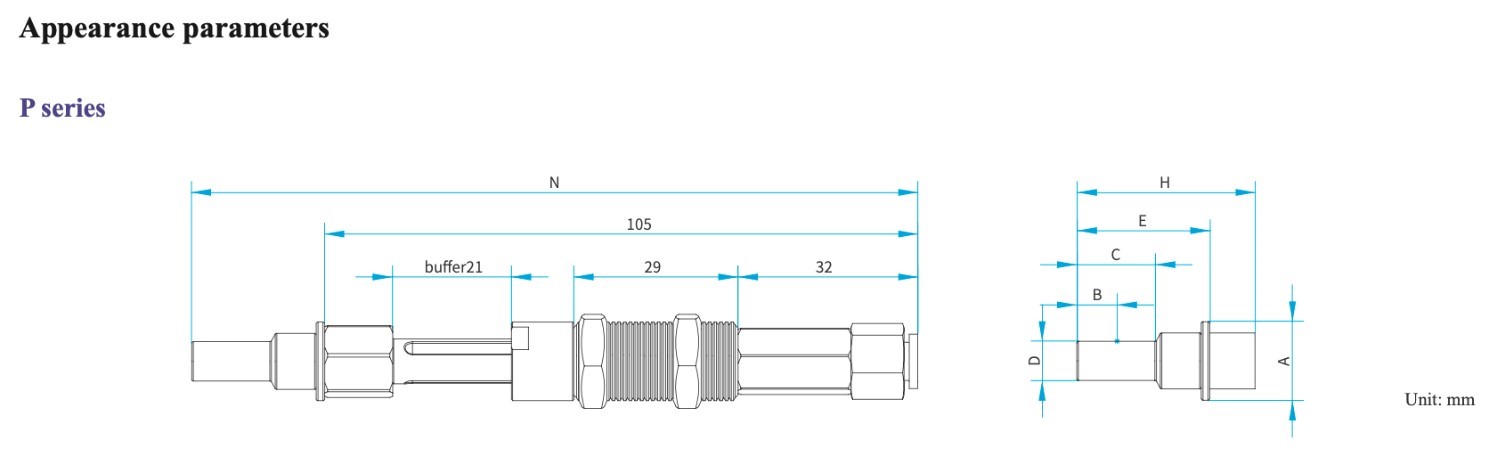
| Modellu | Altezza tutale di u modulu airbag H | Diametru di a superficia di cuntattu D | Diametru di a parte strutturale A | Altezza da u diametru di travagliu à u fondu B | Altezza di a superficia di cuntattu efficace C | Altezza di travagliu di l'airbag modulu E | Lunghezza tutale N |
| ISC-P4.5E | 25,5 | 4.5 | 14 | 4 | 8 | 17,5 | E+105 |
| ISC-P5E | 27,5 | 5 | 14 | 5 | 10 | 19,5 | E+105 |
| ISC-P6E | 30,5 | 6 | 14 | 6 | 12 | 22,5 | E+105 |
| ISC-P7E | 31,5 | 7 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P8E | 31,5 | 8 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P9E | 32,5 | 9 | 14 | 7.5 | 15 | 24,5 | E+105 |
| ISC-P10E | 32,5 | 10 | 14 | 7.5 | 15 | 24,5 | E+105 |
| ISC-P11E | 34,5 | 11 | 14 | 7.5 | 15 | 26,5 | E+105 |
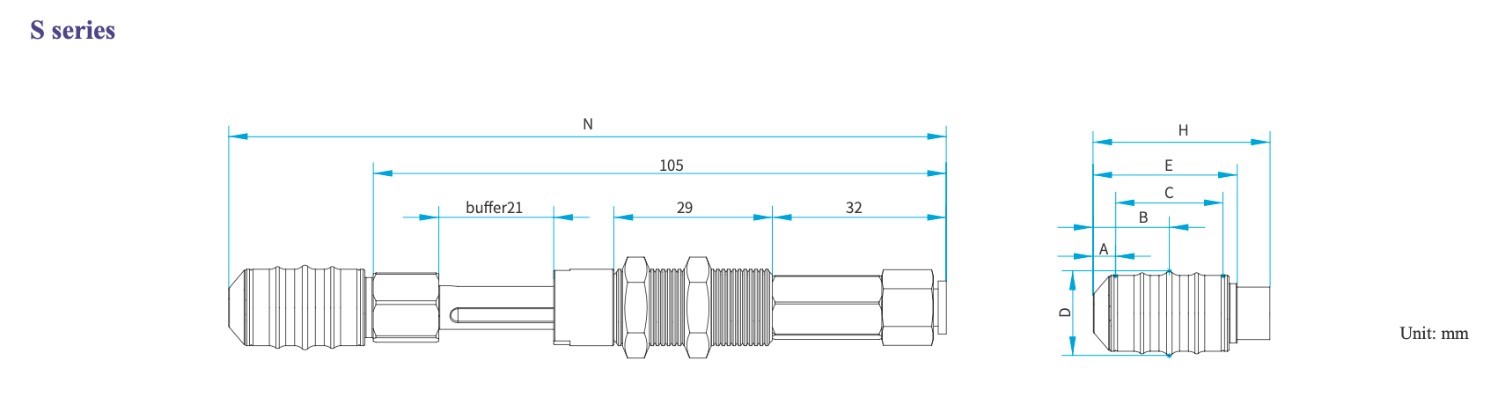
| Modellu | Altezza tutale di u modulu airbag H | Diametru di a superficia di cuntattu D | altezza di guida A | Altezza da u diametru di travagliu à u fondu B | Altezza di a superficia di cuntattu efficace C | Altezza di travagliu di l'airbag modulu E | Lunghezza tutale N |
| ISC-S14E | 32,5 | 14 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S15.5E | 32,5 | 15.5 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S18E | 40,5 | 18 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S20.5E | 40,5 | 20.5 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S23E | 40,5 | 23 | 6 | 19 | 26 | 34,5 | E+105 |
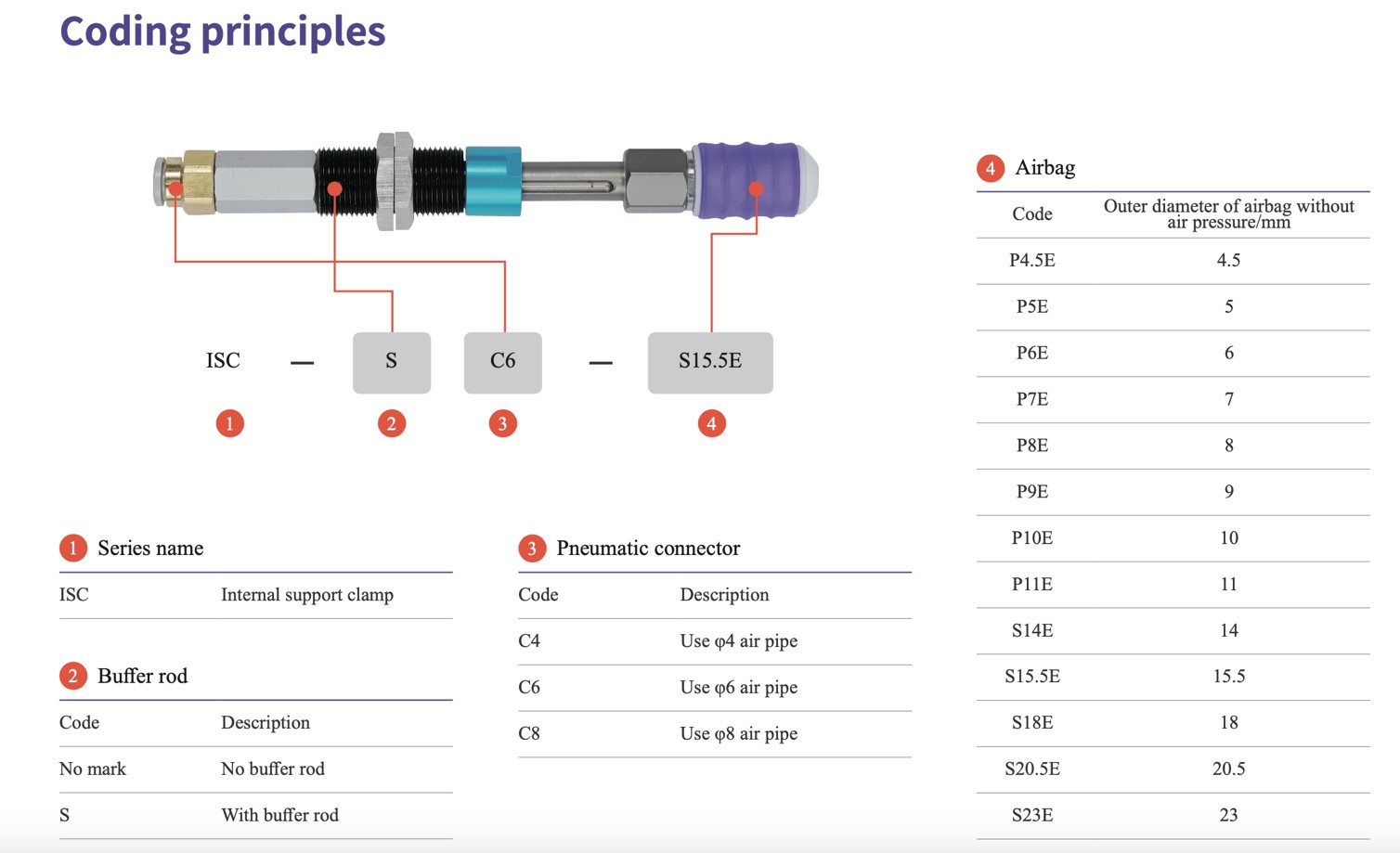
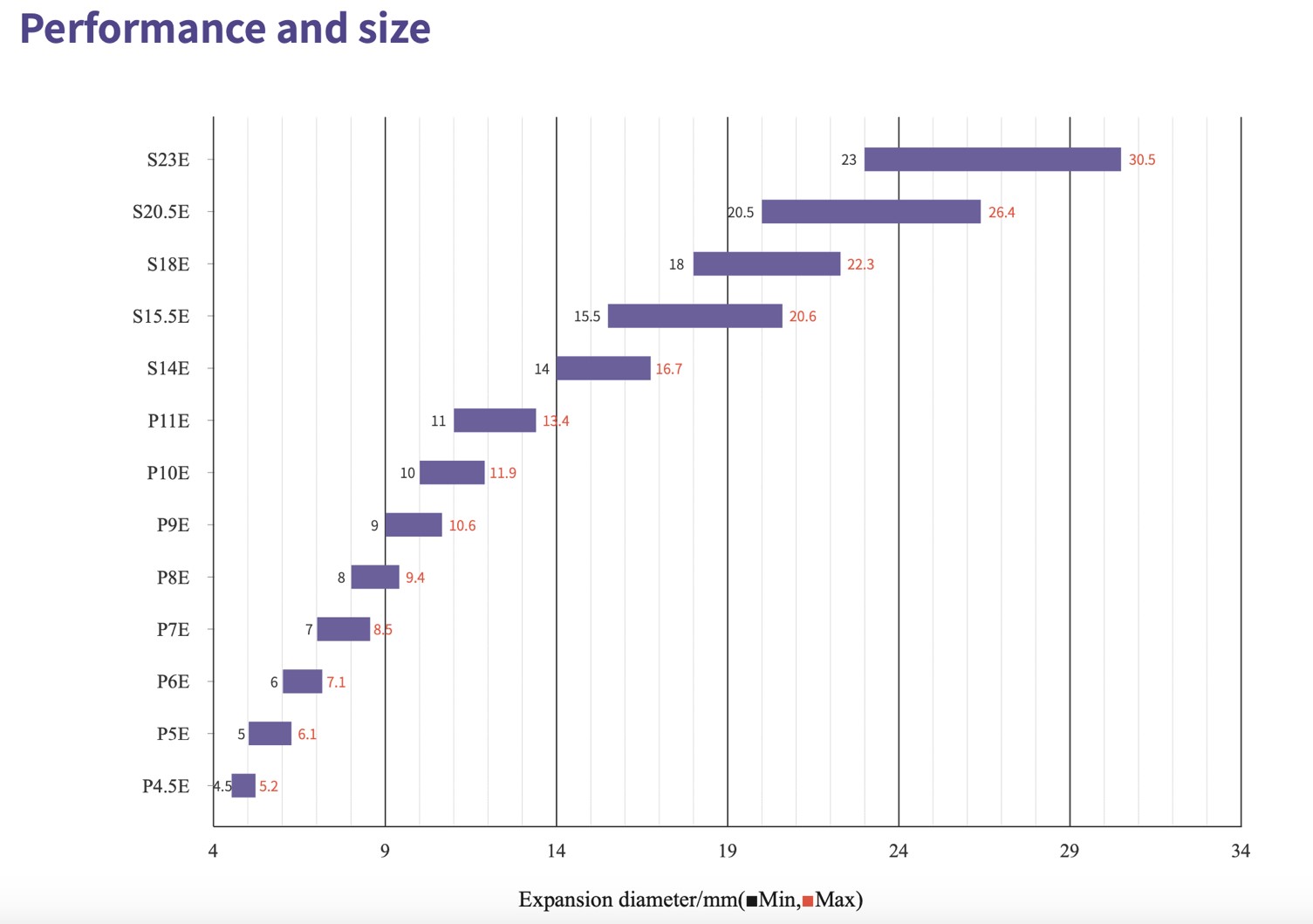
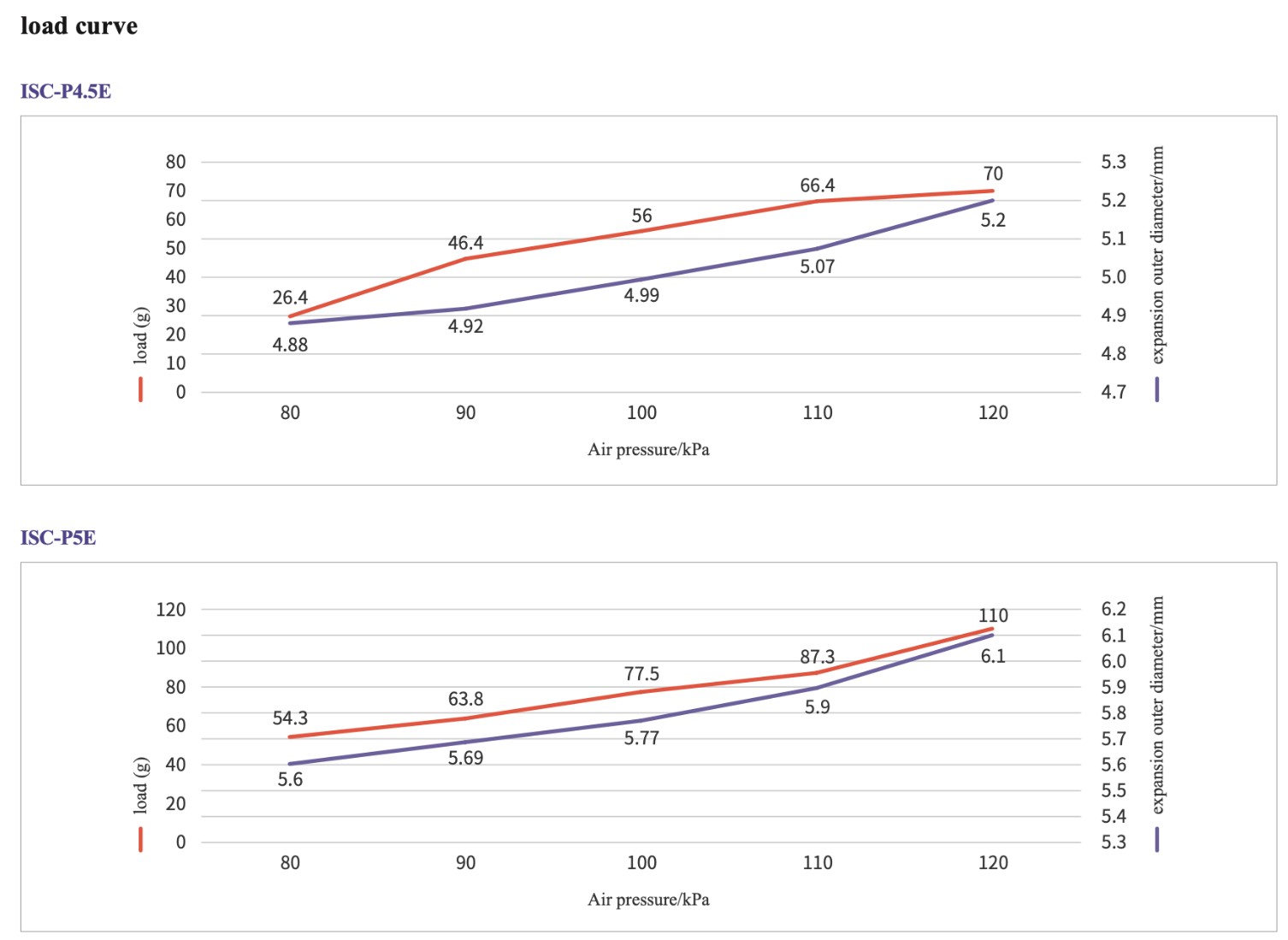
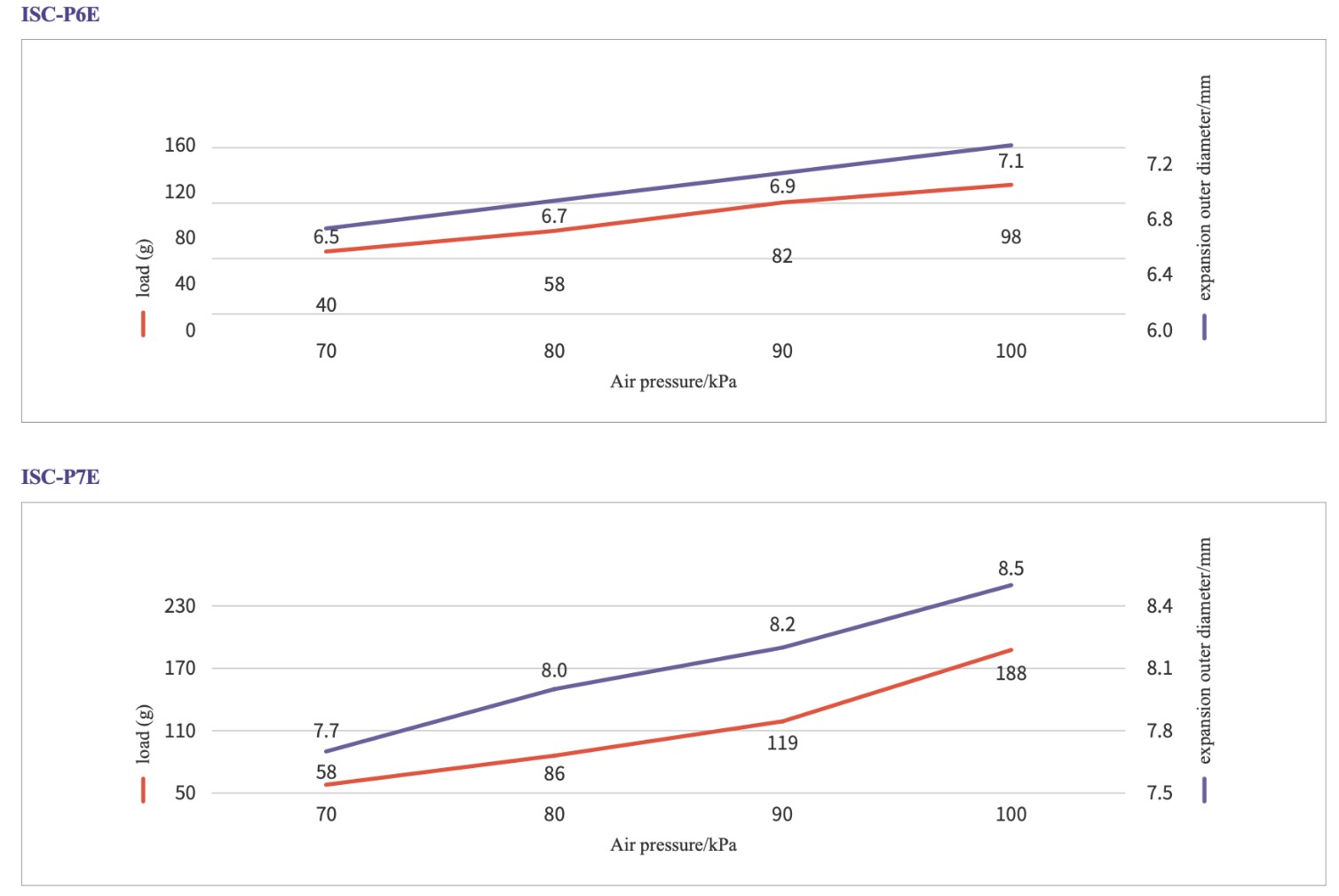
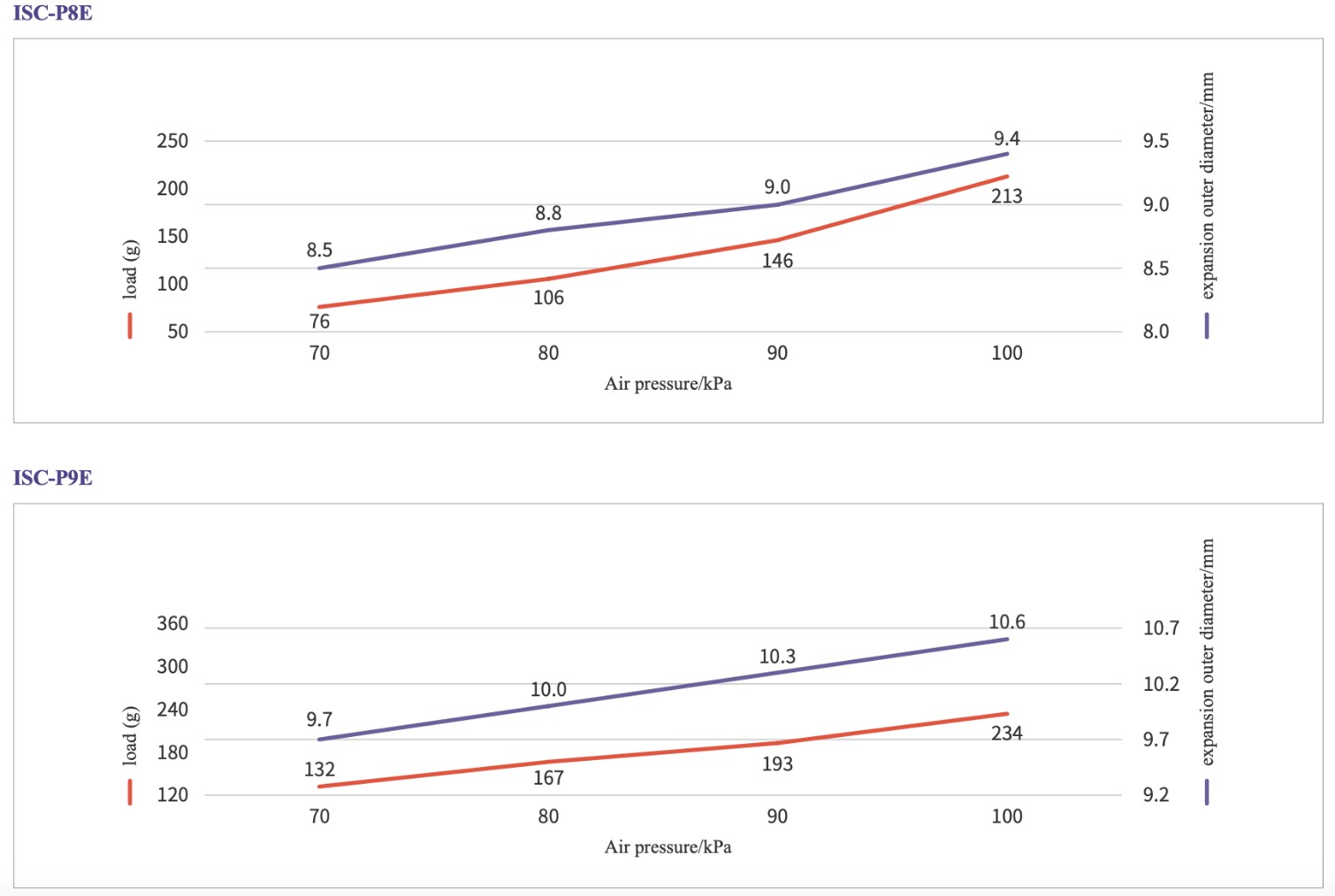
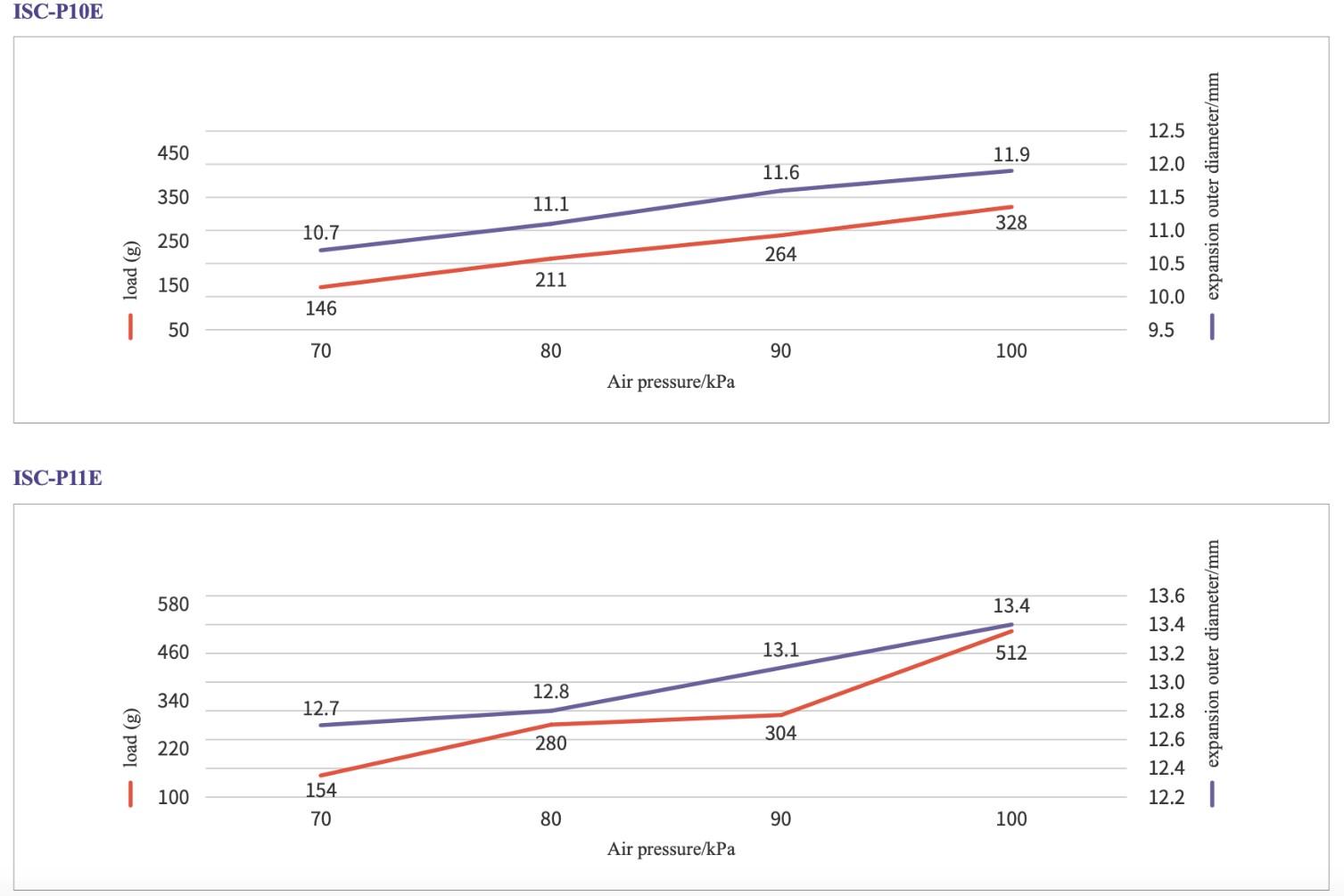
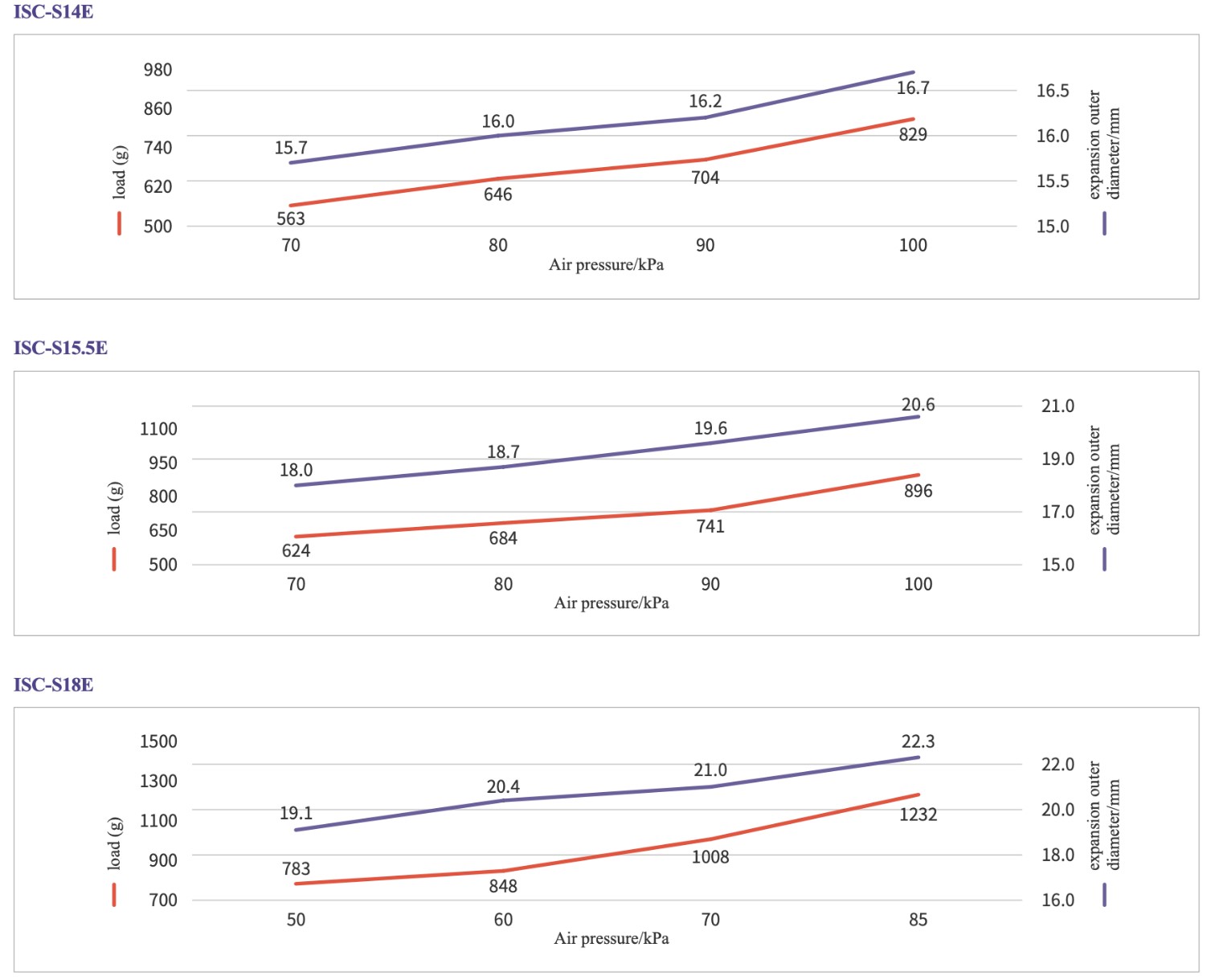
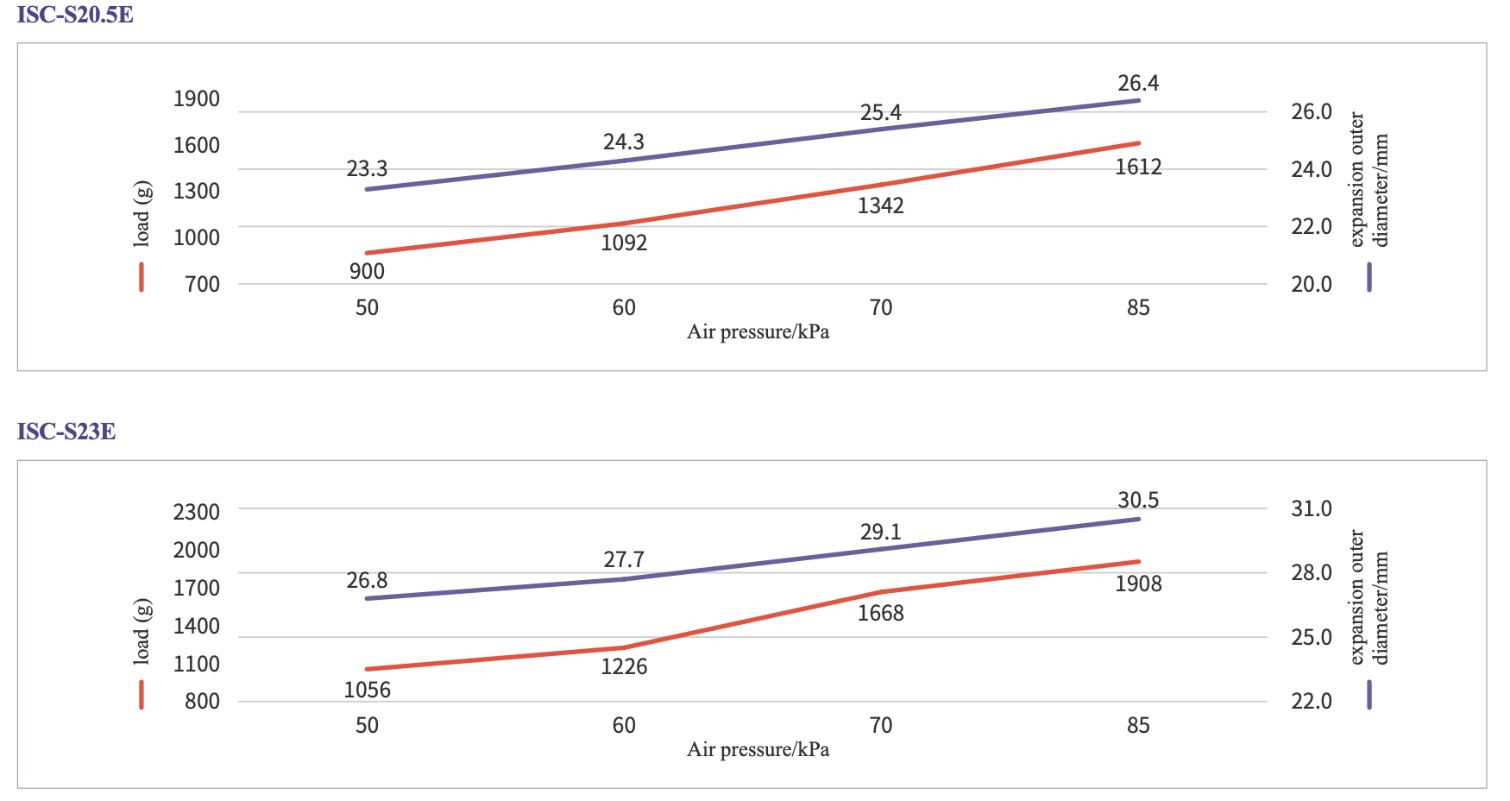
Diametru esternu allargatu
| Modellu | Gamma di pressione di funziunamentu /kPa | Diametru esternu di espansione massima / mm | Carica massima/g | Pesu di l'apparecchiatura/g | Modellu di barra metallica | Dimensione di u foru di muntatura / mm |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P7E | 0-100 | 8.5 | 188 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S23E | 0-85 | 30,5 | 1908 | 51 | VFNT 1421-G18 | 14.5 |
* L'ughjettu di prova di carica massima di a serie P hè u diametru esternu di u mudellu +0,3 mm; L'ughjettu di prova di carica massima di a serie S hè u diametru esternu di u mudellu +1 mm; A prova di carica hè misurata da strumenti prufessiunali.
A nostra attività


Categurie di prudutti
-

PINZA SERVO ELETTRICA DH ROBOTICS SERIE RGD –...
-

SERIE DI PINZE ELETTRICHE HITBOT – Z-EFG-13...
-

SERIE DI CAMBIU RAPIDO – QCA-200-D1 Un cambiamentu rapidu...
-

SERIE CAMBIATORI RAPIDI – QC-200 Manuale Rotonda...
-

SERIE DI CAMBIO RAPIDO – QCA-S100 Un C rapidu...
-

SERIE DI CAMBIO RAPIDO – QCA-S500 Un C rapidu...