SERIE DI PINZE ELETTRICHE HITBOT – Pinza elettrica collaborativa Z-EFG-L



Categoria Principale
Bracciu roboticu industriale / Bracciu roboticu collaborativu / Pinza elettrica / Attuatore intelligente / Soluzioni di automatizazione
Applicazione
E pinze di robot di a serie SCIC Z-EFG sò di piccula dimensione cù un sistema servo integratu, chì permette di ottene un cuntrollu precisu di a velocità, a pusizione è a forza di serraggio. U sistema di presa SCIC d'avanguardia per e soluzioni d'automatizazione vi permetterà di apre nuove pussibilità per automatizà i travaglii chì ùn avete mai pensatu pussibuli.

Funziunalità

· Apertura è chjusura rapida
·Presa in spazii stretti, presa di merci fragili
·Pinza elettrica esclusiva cù corsa di 8 mm per bracciu roboticu à sei assi
·Longa vita: decine di milioni di cicli, superendu l'artigli d'aria
· Cuntrollore integratu: ingombru ridottu, integrazione faciule
·Modu di cuntrollu: Ingressu è uscita I/O
Cuncepimentu Speciale per Bracciu Roboticu à Sei Assi, Pinza Elettrica di Corsa 12 mm
Plug and Play
Cuncepimentu speciale per u bracciu roboticu à sei assi
Alta Frequenza
U tempu u più cortu di una sola corsa hè solu 0,2 s
Guida è Controller Integrati
Sistema di servo integratu, plug and play
U controller hè integratu
Occupazione di picculu spaziu, cunveniente per integrà.
A coda pò esse cambiata
A so coda pò esse cambiata, per risponde à diverse esigenze.
Serraggio dolce
Pò chjappà l'uggetti fragili

● Prumove una rivoluzione in a sustituzione di e pinze pneumatiche da pinze elettriche, prima pinza elettrica cù sistema servo integratu in Cina.
● Rimpiazzamentu perfettu per u compressore d'aria + filtru + elettrovalvula + valvula di farfalla + pinza pneumatica
● Durata di vita di parechji cicli, coerente cù u cilindru giapponese tradiziunale




Parametru di Specificazione
Z-EFG-L hè una pinza parallela elettrica robotica à 2 dite cù una forza di presa di 30N, chì supporta un serraggio dolce, cum'è a presa di ova, pane, tubi per capezzoli, ecc.
| N° di mudellu Z-EFG-L | Parametri |
| Colpu tutale | 12mm |
| Forza di presa | 30N |
| Ripetibilità | ±0,02 mm |
| Pesu di presa cunsigliatu | ≤0,5 kg |
| Modu di trasmissione | Cremagliera + Guida à rulli trasversali |
| Rifornimentu di grassu di i cumpunenti in muvimentu | Ogni sei mesi o 1 milione di movimenti / volta |
| Tempu di muvimentu di colpu unidirezionale | 0,2 s |
| Gamma di temperatura di funziunamentu | 5-55 ℃ |
| Gamma di umidità di funziunamentu | RH35-80 (Senza brina) |
| Modu di muvimentu | Dui dite si movenu orizzontalmente |
| Cuntrollu di a corsa | Nisun regulabile |
| Ajustamentu di a forza di serraggio | Nisun regulabile |
| Pesu | 0,4 kg |
| Dimensioni (L*L*A) | 68*68*113,6mm |
| Piazzamentu di u cuntrollore | Integratu |
| Putenza | 5W |
| Tipu di mutore | CC senza spazzole |
| Tensione nominale | 24V ± 10% |
| Currente di piccu | 1A |
| Bracciu roboticu à sei assi adattabile | UR, Aubo |
Bracciu roboticu à sei assi, Plug and Play
A pinza elettrica Z-EFG-L pò esse cumpatibile cù u bracciu roboticu collaborativu mainstream in u mercatu, hà un altu gradu di prutezzione è una grande carica.


Guida è Controller Integrati
Z-EFG-L hè una piccula pinza elettrica chì hà un sistema servo integratu, hà una corsa di 12 mm, a forza di serraggio hè 30 N, una Z-EFG-L pò rimpiazzà u compressore d'aria + filtru + valvula magnetica elettronica + valvula di farfalla + pinza d'aria.
Piccula figura, flessibile da installà
A dimensione di a pinza elettrica Z-EFG-L hè L68 * W68 * H113.6mm, a so struttura hè compatta, supporta parechje modalità d'installazione, u so controller hè integratu, occupendu un picculu spaziu, pò esse faciule da trattà cù diverse esigenze per i travaglii di serraggio.


Reazione rapida, cuntrollu di precisione
U tempu u più cortu di una sola corsa hè di 0,45 s, a so parte di coda pò esse cambiata à piacè, i clienti ponu esse flessibili per adattà a pinza elettrica secondu i so bisogni di pruduzzione.
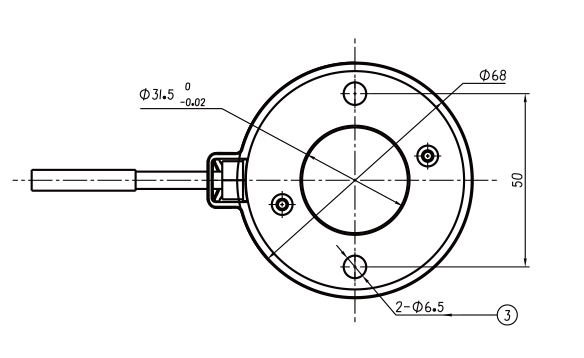
Schema d'installazione di dimensioni
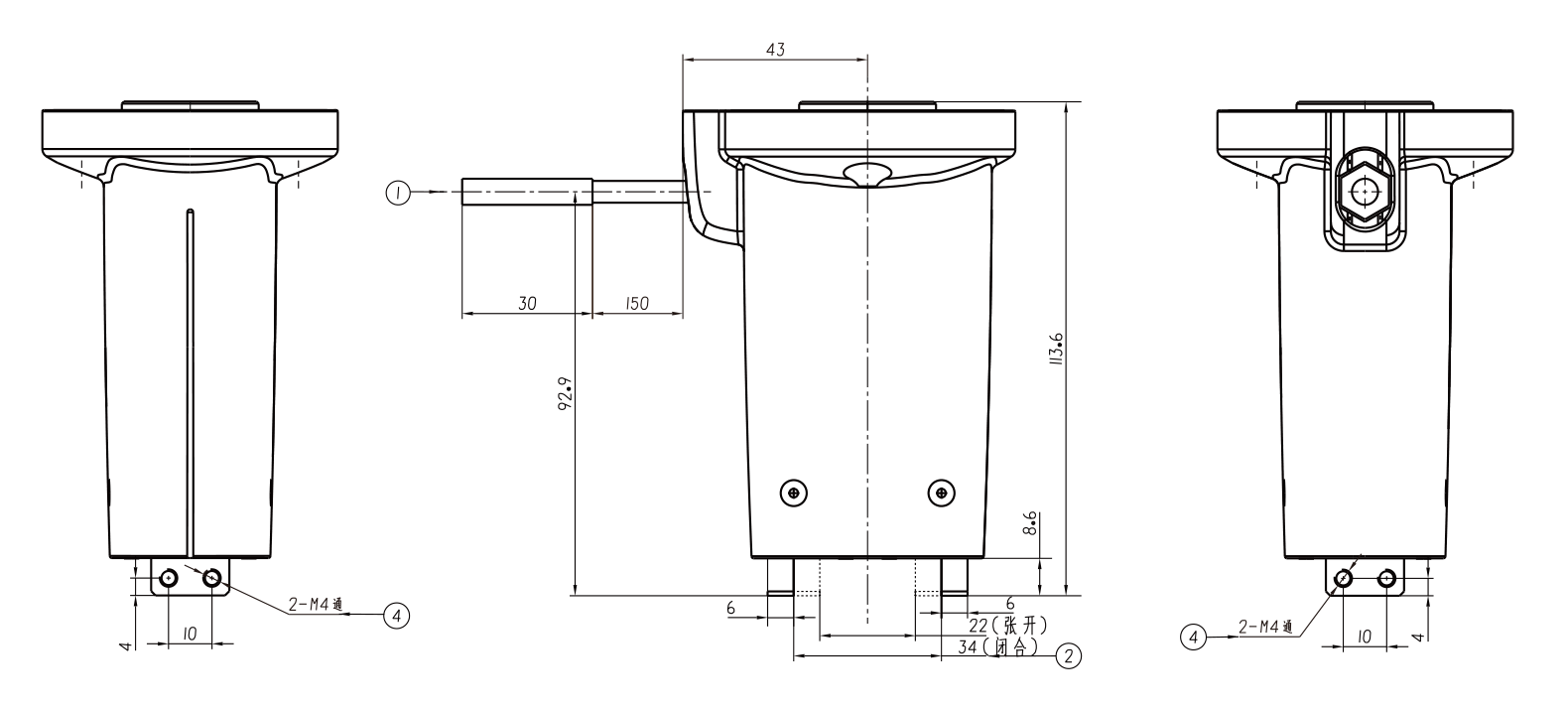
① RKMV8-354 Spina d'aviazione à cinque fili à RKMV8-354
② A corsa di a pinza elettrica hè qwmm
③ Posizione d'installazione, aduprate duie viti M6 per cunnette cù a flangia à a fine di u bracciu di u robot UR
④ Posizione d'installazione, posizione d'installazione di l'apparecchiatura (vite M6)
Parametri Elettrici
Tensione nominale 24 ± 2 V
Corrente 0.4A

A nostra attività







