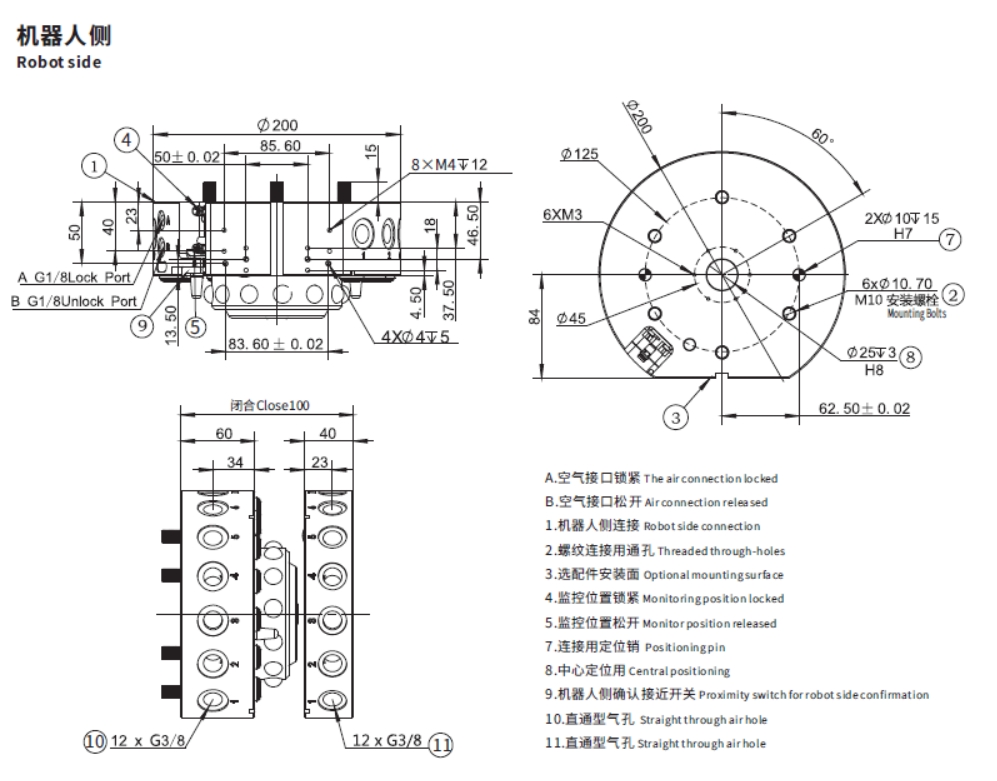
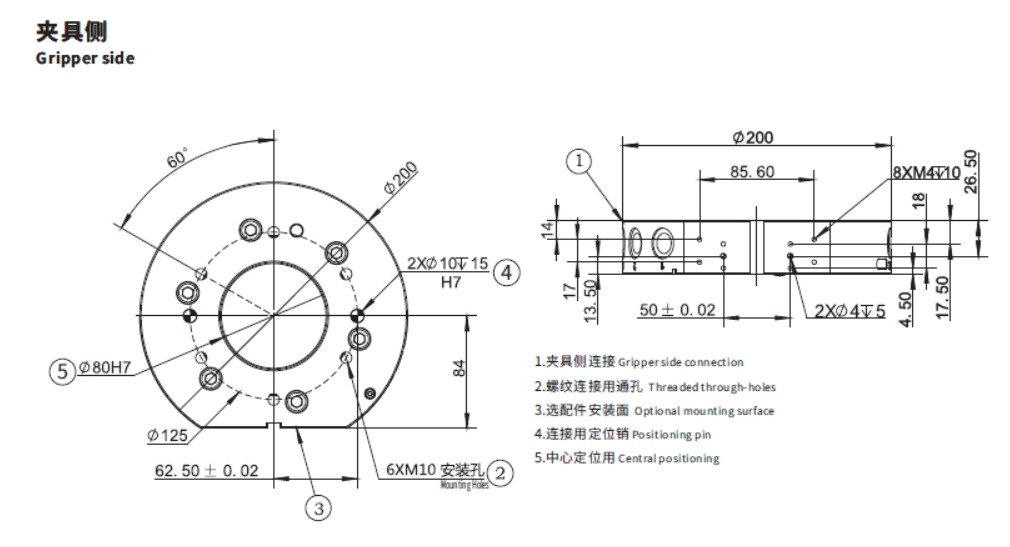
SERIE DI CAMBIU RAPIDO – QCA-200 Un Dispositivu di Cambiamentu Rapidu à a Fine di un Robot


Categoria Principale
Cambiatore di Strumenti Roboticu / Cambiatore di Strumenti à Estremità di Bracciu (EOAT) / Sistema di Cambiamentu Rapidu / Cambiatore di Strumenti Automaticu / Interfaccia di Strumenti Robotichi / Lato Robot / Lato Pinza / Flessibilità di l'Utensili / Sganciu Rapidu / Cambiatore di Strumenti Pneumaticu / Cambiatore di Strumenti Elettricu / Cambiatore di Strumenti Idraulicu / Cambiatore di Strumenti di Precisione / Meccanismu di Bloccaggio di Sicurezza / Effettore Finale / Automatizazione / Efficienza di Cambiamentu di Strumenti / Scambiu di Strumenti / Automatizazione Industriale / Strumenti Robotichi à Estremità di Bracciu / Design Modulare
Applicazione
L'utensili di punta (EOAT) sò largamente aduprati in industrie cum'è a fabricazione automobilistica, l'elettronica 3C, a logistica, u stampaggio à iniezione, l'imballaggio alimentariu è farmaceuticu, è a trasfurmazione di i metalli. E so funzioni principali includenu a manipulazione di pezzi, a saldatura, a spruzzatura, l'ispezione è u cambiamentu rapidu di l'utensili. EOAT migliora significativamente l'efficienza di a produzzione, a flessibilità è a qualità di u produttu, rendendulu una parte essenziale di l'automatizazione industriale muderna.
Funziunalità
Alta precisione
U latu di a pinza di regulazione di u pistone ghjoca u rolu di pusizionamentu, chì furnisce una alta precisione di pusizionamentu ripetutu. Un milione di testi di cicli mostranu chì a precisione attuale hè assai più alta di u valore raccomandatu.
Alta resistenza
U pistone di bloccaggio cù un grande diametru di cilindru hà una forte forza di bloccaggio, u dispusitivu rapidu di fine robot SCIC hà una forte capacità anti-coppia. Quandu si blocca, ùn ci serà micca tremulazione per via di u muvimentu à alta velocità, evitendu cusì u fallimentu di u bloccaggio è assicurendu una precisione di posizionamentu ripetuta.
Alte prestazioni
U mecanismu di chjusura cù un disignu di superficia multi-conica, cumpunenti di sigillatura di longa durata è sonda di cuntattu elastica di alta qualità sò aduttati per assicurà u cuntattu strettu di u modulu di signale.



Parametru di Specificazione
| Serie di Cambiatore Rapidu | ||||
| Modellu | Carica utile massima | Percorsu di gasu | Forza di chjusura à 80 Psi (5,5 Bar) | Pesu di u pruduttu |
| QCA-05 | 5 chilò | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 chilò | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 chilò | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 chilò | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 chilò | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 chilò | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 chilò | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 chilò | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 chilò | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 chilò | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 chilò | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 chilò | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 chilò | / | 31000N | 9,4 kg |
| QCA-S500 | 500 chilò | / | 37800N | 23,4 kg |

Latu di u robot

Latu di a pinza
Modulu applicabile
Tipu di Modulu
| Nome di u produttu | Modellu | PN | Tensione di travagliu | Corrente di travagliu | Connettore | Connettore PN |
| Modulu di signale laterale di u robot | QCSM-15R2 | 7.Y00468 | 24V | 2.5A | D-Sub15R2-10001 | 1.Y10080 |
| Modulu di signale laterale di a pinza | QCSM-15G2 | 7.Y00469 | 24V | 2.5A | D-Sub15G2-10001 | 1.Y10081 |
| Modulu di signale laterale di u robot | QCSM-08R | 7.Y00477 | 380V | 30A | 3108A22-23S2 | 1.Y10710 |
| Modulu di signale laterale di a pinza | QCSM-08G | 7.Y00478 | 380V | 30A | 3108A22-23P2 | 1.Y10711 |
| Modulu di signale laterale di u robot | QCSM-19R | 7.Y00954 | 220V | 3A | MS3116F14-19S/-Y2 | 1.Y11420 |
| Modulu di signale laterale di u robot | QCSM-19R | 7.Y00954 | 220V | 3A | CMB08E-14-19S(072)SR-B2 | 1.Y11863 |
| Modulu di signale laterale di u robot | QCSM-19R1 | 7.Y02123 | 220V | 3A | MS3116F14-19S/-Y2 | 1.Y11420 |
| Modulu di signale laterale di u robot | QCSM-19R1 | 7.Y02123 | 220V | 3A | CMB08E-14-19S(072)SR-B2 | 1.Y11863 |
| Modulu di signale laterale di a pinza | QCSM-19G | 7.Y00955 | 220V | 3A | MS3116F14-19P/-Y2 | 1.Y11419 |
| Modulu di signale laterale di a pinza | QCSM-19G | 7.Y00955 | 220V | 3A | CMB08E-14-19P(072)SR-B2 | 1.Y11864 |
| Modulu di signale laterale di u robot | QCSM-26R | 7.Y00464 | 220V | 3A | MS3116F16-26S/-Y2 | 1.Y11867 |
| Modulu di signale laterale di u robot | QCSM-26R | 7.Y00464 | 220V | 3A | CMB08E-16-26S(072)SR-B2 | 1.Y11865 |
| Modulu di signale laterale di a pinza | QCSM-26G | 7.Y00465 | 220V | 3A | MS3116F16-26P/-Y2 | 1.Y11369 |
| Modulu di signale laterale di a pinza | QCSM-26G | 7.Y00465 | 220V | 3A | CMB08E-16-26P(072)SR-B2 | 1.Y11866 |
| Modulu di signale laterale di a pinza | QCSM-21/26G | 7.Y02117 | 220V | 3A | MS3116F16-26P/-Y2 | 1.Y11369 |
| Modulu di signale laterale di a pinza | QCSM-21/26G | 7.Y02117 | 220V | 3A | CMB08E-16-26P(072)SR-B2 | 1.Y11866 |
| Modulu di signale laterale di u robot | QCSM-32R | 7.Y02095 | 220V | 3A | MS3116F22-36S2 | 1.Y13392 |
| Modulu di signale laterale di u robot | QCSM-32R | 7.Y02095 | 220V | 3A | MS3118F22-36S2 | 1.Y13393 |
| Modulu di signale laterale di a pinza | QCSM-32G | 7.Y02096 | 220V | 3A | MS3116F22-36P2 | 1.Y13394 |
| Modulu di signale laterale di a pinza | QCSM-32G | 7.Y02096 | 220V | 3A | MS3118F22-36P2 | 1.Y13395 |
①A lunghezza di u cavu hè di 1 metru ②Solu giuntu, senza filu
Modulu d'estensione pneumatica
| Nome di u produttu | Modellu | PN | Percorsu di u Gasu | Foru filettatu |
| Modulu d'estensione pneumatica latu robot | QCAM-06G18R | 7.Y01015 | 6 | G1/8 |
| Modulu d'estensione pneumatica lato pinza | QCAM-06G18G | 7.Y01016 | 6 | G1/8 |
| Modulu d'estensione pneumatica latu robot | QCAM-06G18R-E | 7.Y01018 | 6 | G1/8 |
| Modulu d'estensione pneumatica lato pinza | QCAM-06G18G-E | 7.Y01019 | 6 | G1/8 |
| Modulu d'estensione pneumatica latu robot | QCAM-10M5R | 7.Y01053 | 10 | M5 |
| Modulu d'estensione pneumatica lato pinza | QCAM-10M5G | 7.Y01054 | 10 | M5 |
| Modulu d'estensione pneumatica latu robot | QCAM-14M5R | 7.Y01055 | 14 | M5 |
| Modulu d'estensione pneumatica lato pinza | QCAM-14M5G | 7.Y01056 | 14 | M5 |
| Modulu d'estensione pneumatica autoproclamatu da u latu di u robot | QCAM-06G18R-F | 7.Y02005 | 6 | G1/8 |
| Modulu d'estensione pneumatica autoproclamatu da u latu di a pinza | QCAM-06G18G-F | 7.Y02006 | 6 | G1/8 |
| Modulu d'estensione pneumatica latu robot | QCAM-04G38R | 7.Y02043 | 4 | G3/8 |
| Modulu d'estensione pneumatica lato pinza | QCAM-04G38G | 7.Y02044 | 4 | G3/8 |
Tipu di Modulu d'Alta Frequenza
| Nome di u produttu | Modellu | PN | Tensione di travagliu | Corrente di travagliu |
| Modulu di signale latu robot | QCHFM-E14-C1R | 7.Y02003 | 1.4KV | 5A |
| Modulu di signale latu pinza | QCHFM-E14-C1G | 7.Y02004 | 1.4KV | 5A |
Modulu di signale (interfaccia di cavu di rete)
| Nome di u produttu | Modellu | PN |
| Modulu di signale laterale di u robot | QCSM-RJ45-06R | 7.Y02007 |
| Modulu di signale laterale di a pinza | QCSM-RJ45-06G | 7.Y02008 |
Modulu di putenza servo
| Nome di u produttu | Modellu | PN |
| Modulu di putenza servo laterale di u robot | QCSM-08R1 | 7.Y02080 |
| Modulu di putenza servo laterale di a pinza | QCSM-08G1 | 7.Y02081 |
Modulu di signale servo
| Nome di u produttu | Modellu | PN |
| Modulu di signale servo latu robot | QCSM-12R | 7.Y02082 |
| Modulu di signale servo laterale di a pinza | QCSM-12G | 7.Y02083 |
Modulu d'aria fluida autosigillante
| Nome di u produttu | Modellu | PN |
| Modulu di signale laterale di u robot | QCWM-02R | 7.Y02049 |
| Modulu di signale laterale di a pinza | QCWM-02G | 7.Y02050 |
A nostra attività


Categurie di prudutti
-

SERIE DI PINZE ELETTRICHE HITBOT – Z-EFG-C5...
-

PINZA SERVO ELETTRICA DH ROBOTICS SERIE RGI –...
-

SERIE DI CAMBIU RAPIDO – QCA-35 Un cambiamentu rapidu...
-

SERIE DI CAMBIU RAPIDO – QCA-S50 Un cambiamentu rapidu...
-

PINZA SERVO ELETTRICA DH ROBOTICS SERIE RGI –...
-

DH ROBOTICS SERVO ELETTRICA SERIE PGC –...